
INSTITUTO TECNOLÓGICO DE ACAPULCO
DEPARTAMENTO DE METALMECÁNICA
INGENIERÍA ELECTROMECÁNICA
 MATERIA: Ingeniería de Control
MATERIA: Ingeniería de Control
HORARIO: 11:00 – 12:00
EJEMPLOS DE SISTEMAS ELÉCTRICOS Y MECÁNICOS CON MODELADO MATEMÁTICO.
NOMBRE DEL EQUIPO: MASTER´S
ALUMNOS:
REPRESENTANTE DE EQUIPO:
ÁLVAREZ MILLÁN JOSÉ ÁNGEL 10320066
HUERTA CRUZ JOSE ANTONIO 10320083
AGATON VAZQUEZ JAVIER 10320064
APARICIO JIMENEZ WILLIAN IVAN 10320067
1.- Ejemplo de modelado eléctrico: Nodos.
En estos sistemas se
aplicarán las leyes de Kirchhoff, tanto los métodos de mallas como los de
nudos. Por ejemplo, el programa PSPICE suele emplear el método de los nudos.
Para el análisis de los
cuadripolos eléctricos se empleará, en este caso, el método de mallas y se
tratará de obtener el conjunto de ecuaciones álgebra diferenciales que
expliquen las relaciones entre las entradas y las salidas. Posteriormente, se
aplicará las transformadas de Laplace y se conseguirá la FDT, ya sea por
tratarse de un sistema LTI o por un proceso de linealización.
En el capítulo 2, en el
ejemplo 2.3, se había analizado la relación entre la tensión de salida y
entrada en un cuadripolo RC. Considerando condiciones iniciales nulas, se
obtenía fácilmente la ganancia de tensión y por tanto, su FDT:

Aplicando transformada de
Laplace, con condiciones iniciales nulas:

Un cuadripolo algo más
complejo sería el mostrado en la figura 4.1 b. A simple vista parece que
resulta una cascada en serie de dos circuitos RC y que podría decirse que su
FDT, por lo estudiado en el anterior capítulo, es el producto de los dos
bloques:

Sin embargo, el resultado es
falso. En primer lugar, se ha atentado contra la propia definición de bloque que
se ha dado en el anterior capítulo (ver apartado 3.3). Al considerar que la
señal de salida del subsistema sólo depende de la entrada, cuando la salida del
primer cuadripolo está acoplada con la impedancia de entrada del segundo.
No es verdad que la relación que hay entre la
tensión del condensador 1 y la entrada sea:

La corriente que circula por
R1 es la que circula por C1 más otra corriente que pasa por R2. Se observa que
existe un acoplamiento entre los dos cuadripolos y que por tanto, están equivocadas
las ganancias de tensión de los dos bloques. Es un problema de adaptación de
impedancias entre los dos subsistemas. El planteamiento correcto podría hacerse
a través del método de mallas:

En el conjunto de ecuaciones
algebro-diferenciales se hace notar que la corriente que circula por R2 es
igual que a la de C2, lo que supone que la impedancia que ve la salida hacia el
exterior es infinita y es, por tanto, una simplificación. Esta consideración es
válida bien porque se está empleando un equipo de medida en la salida o bien se
encadenará, la salida, a una estructura de amplificación lineal con
operacionales, la cual presenta esta característica, alta impedancia en su
entrada.
Considerando condiciones
iníciales nulas, la FDT del cuadripolo 4.1b) será:

Vea las discrepancias
existentes entre la ecuación (4. 1) y (4. 2).
En el tratamiento de las
señales continuas de las estructuras de control se suelen emplear el
procesamiento eléctrico. Los sistemas que se encargan de esta tarea están
constituidos por una combinación de cuadripolos eléctricos pasivos y de
amplificadores operacionales. Sus posibilidades van desde la implementación de
reguladores PIDs, hasta la construcción de las señales de mando, los
acondicionamientos de los transductores y acabando en la realización física de
los sumadores. Desde luego, la amplitud de este conocimiento es tan grande que
existe una disciplina para su elaboración. Se llama Instrumentación
Electrónica. Sólo se va a dar un par de pinceladas, las suficientes, para poder
comprender la importancia de esta materia, así como, cumplir con los
prerrequisitos necesarios para entender los aspectos de construcción que van a
verse a lo largo de este curso básico de Control.
2.- Ejemplo de modelado en Sistemas
mecánicos
Los movimientos de los
sistemas mecánicos se pueden describir como de traslación o de rotación o de
una combinación de ambos. Las ecuaciones que gobiernan los sistemas mecánicos
están formuladas por la ley de movimiento de Newton.
Movimiento
de traslación
Son los movimientos que se
caracterizan por el desplazamiento de un cuerpo a lo largo de una línea recta. La
ley de Newton sobre cuerpos rígidos dice que la suma algebraica de fuerzas es igual
a la masa del cuerpo por el vector de aceleración:

En la relación causa-efecto
del desplazamiento, los cuerpos sometidos a un conjunto de fuerzas, pueden ser
modelados a través de tres elementos base: masa, resorte o muelle y rozamiento
o fricción. La masa es la propiedad de un elemento de almacenar energía cinética
del movimiento de traslación:

Muelle es un elemento que
almacena energía potencial al ser sometido por una fuerza externa:


Siendo k la constante del muelle. En cuanto a la fricción o rozamiento,
modelan la conversión de la potencia mecánica en flujo calorífico, fenómeno que
aparece cuando se deslizan dos superficies que están en contacto. Su expresión
matemática es no lineal. Existen tres tipos de modelos: fricción viscosa, fricción
estática y fricción de Coulomb. La primera es lineal y las otras dos siguientes
no son lineales. En este curso, sólo se empleará el rozamiento viscoso para
simplificar la función de transferencia de estos sistemas.
La fricción viscosa
representa la relación lineal entre la fuerza aplicada a un cuerpo con la
velocidad de desplazamiento entre este cuerpo y otro que está en contacto con
él. Se modela como un pistón que se mueve dentro de un cilindro. El pistón se desplaza
dentro del cilindro a través de una película de aceite. El aceite resiste
cualquier movimiento relativo entre el pistón y la concavidad del cilindro;
este efecto es debido a que el aceite puede fluir alrededor de la cámara del
pistón. En este tipo de rozamiento, la transferencia de energía mecánica a
calorífica es de carácter lineal. La expresión matemática es:

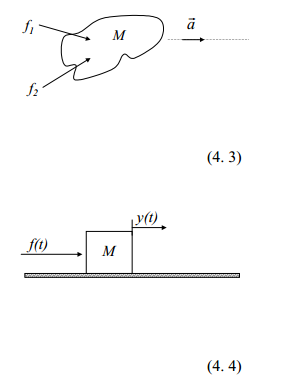
Ejemplo 4.1
Obtener la relación causa
efecto entre la fuerza aplicada a un carro sujeto a la pared a través de un muelle
y el desplazamiento que se produce en éste. La masa del carro es M, el coeficiente
del resorte es K y el rozamiento entre las ruedas y la superficie se modela con
el coeficiente de rozamiento B. Considere condiciones iniciales nulas.

La ecuación diferencial que
explica el desplazamiento del carro según el eje X, en la misma dirección que
la fuerza, es:

3.- Ejemplo de modelado eléctrico de motor de continua de imán
permanente.
De los motores de corriente
continua, por los que más interés muestra la teoría de control, son por los de
imanes permanentes. No necesitan de una fuente exterior para generar el flujo
magnético, facilitan el diseño del sistema de control y actualmente ofrecen una
buena relación par-peso. A estos motores son a los que se van a modelar su comportamiento
dinámico. La tensión en la entrada será igual a la caída de tensión en la resistencia
de armadura, al efecto del flujo magnético disperso y a la fuerza contra electromotriz.
Tanto la fuerza contra electromotriz como el par mecánico, por los principios
básicos de los motores eléctricos, son proporcionales a la velocidad angular y a
la corriente en el rotor, respectivamente. El par de motor será igualado a los dispositivos
de almacenamiento y de disipación de energía mecánica equivalente, vista desde
el rotor.



Del esquema se desprende que existe una realimentación interna en el
motor que tiende a garantizar la estabilidad del funcionamiento. Su causa es
que la f.c.e.m. se opone con mayor fuerza a medida de que aumente la velocidad
angular del rotor.
4.- Ejemplo de modelado Eléctrico; La maqueta de motor de corriente
continúa.
La maqueta de motor de
corriente continua de las prácticas de Regulación Automática está constituida
por un motor MAXON de baja inercia.
Al eje del motor se le ha
acoplado un tren de engranajes con una relación 1:197, al que se considera de
comportamiento ideal. El fabricante da los siguientes datos:
Resistencia de armadura =
7.94 Ω.
Inductancia equivalente del
flujo disperso = 1.54 mH
Constante del par motor =
39.3 mNm/A.
Constante de la fuerza contra electromotriz => 243 rpm/V.
Momento de inercia del
rotor= 26.6 gr cm2
Experimentalmente se ha
obtenido el equivalente de la carga, vista desde la salida del tren de
engranajes:
Momento de inercia de la
carga = 48.5 10-3 kg m2.
Rozamiento viscoso = 660
10-3 N.m.s/rad.
Considérese ideal el
tren de engranajes. Obtener su FDT total, entre la velocidad del motor y su
nivel de tensión aplicada.
